红外跟随避障模块详解
2024/12/4 23:02:53

本文主要是介绍红外跟随避障模块详解,对大家解决编程问题具有一定的参考价值,需要的程序猿们随着小编来一起学习吧!
在智能车、机器人和自动化等领域避障技术是确保安全和高效运行的关键。红外避障模块作为一种常见的避障解决方案,因其非接触、响应速度快和抗干扰能力强等优点而备受青睐。本文将详细介绍红外避障模块的特点、工作原理、以及应用案例,帮助您更好地了解这一技术。
我们在之前的教程中还介绍了红外避障模块的“兄弟”——循迹模块,两者相似,大家可以一起看看【循迹模块连接】
1. 源码下载及前置阅读
本文首发 良许嵌入式网 :https://www.lxlinux.net/e/ ,欢迎关注!
本文所涉及的源码及安装包如下(由于平台限制,请点击以下链接阅读原文下载):
https://www.lxlinux.net/e/stm32/ia-tutorial.html
如果你是嵌入式开发小白,那么建议你先读读下面几篇文章。
- 手把手让你掌握MDK的使用方式和技巧,助你更高效地进行开发:【一文教你使用MDK开发工具:https://www.lxlinux.net/e/stm32/mdk-development-tool-tutorial.html】
- 通俗易懂的 GPIO 介绍与实践:【如何快速成为点灯大师?:https://www.lxlinux.net/e/stm32/stm32-gpio-hal.html】
- 了解不同的下载程序方法,为你的嵌入式开发提供更多选择:【STM32下载程序的五种方法:https://www.lxlinux.net/e/stm32/five-ways-to-flash-program-to-stm32.html】
往期教程,有兴趣的小伙伴可以看看。
- 让你轻松掌握温湿度传感器:【手把手教你玩转DHT11(原理+驱动):https://www.lxlinux.net/e/stm32/dht11-tutorial.html】
- ESP8266详解,助你成为物联网应用的专家:【手把手教你玩转ESP8266(原理+驱动):https://www.lxlinux.net/e/stm32/esp8266-tutorial.html】
- 蓝牙模块详解,轻松掌握一种无线通信技术:【手把手教你玩转蓝牙模块(原理+驱动):https://www.lxlinux.net/e/stm32/bluetooth-turorial.html】
| 作者简介 |
|---|
| 大家好,我是良许,博客里所有的文章皆为我的原创。 下面是我的一些个人介绍,欢迎交个朋友: · 211工科硕士,国家奖学金获得者; · 深耕嵌入式11年,前世界500强外企高级嵌入式工程师; · 书籍《速学Linux作者》,机械工业出版社专家委员会成员; · 全网60W粉丝,博客分享大量原创成体系文章,全网阅读量累计超4000万; · 靠自媒体连续年入百万,靠自己买房买车。 |
我本科及硕士都是学机械,通过自学成功进入世界500强外企。我已经将自己的学习经验写成了一本电子书,超千人通过此书学习并转行成功。现在将这本电子书免费分享给大家,希望对你们有帮助:
电子书链接:https://www.lxlinux.net/1024.html
2. 模块介绍
2.1 型号介绍
红外避障模块不断发射红外信号,当红外信号:
- 有反射回来,OUT 输出低电平,输出指示灯(绿灯)亮。
- 没反射回来,OUT 输出高电平,输出指示灯(绿灯)灭。
红外避障模块常见用途:
- 机器人避障
- 小车避障、跟随
- 流水线计数
- 黑白线循迹

2.2 工作参数及引脚介绍
红外避障模块工作参数:
- 工作电压:DC 3.3 ~ 5V
- 工作温度:-10°C ~ +50°C
- 检测角度:35°
- 检测距离:2 ~ 30 CM可调(不同厂家略有差异),距离越近性能越稳定。
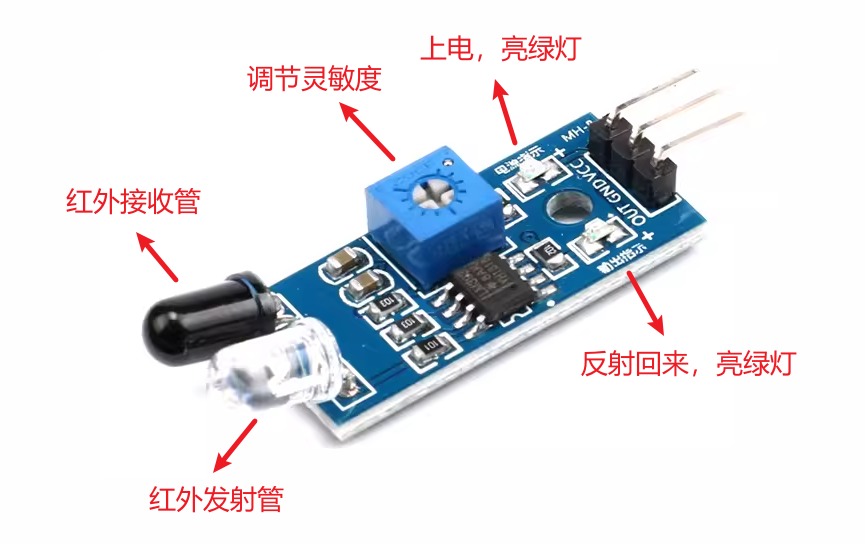
模块中蓝色的电位器用于调节灵敏度,顺时针旋转,灵敏度变高,检测距离变长;逆时针越小,灵敏度变低,检测距离变短。
上电后电源指示灯(绿灯)亮。
当红外反射回来,OUT 输出低电平,输出指示灯(绿灯)亮。
接线如下:
| 红外避障模块 | STM32 | 备注 |
|---|---|---|
| VCC | 3.3/5V | 电源正极 |
| GND | GND | 电源负极 |
| OUT | 任意 GPIO 口 | 数字输出 |
3. 红外避障模块工作原理
红外避障模块上的一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物时,红外线反射回来被接收管接收,经过比较器(LM393)电路处理之后,信号输出接口输出低电平信号,同时绿色指示灯会亮起。
因为黑色能够吸收红外线(红外线不反射),而白色不行(红外线反射),所以除了避障外可用作黑白线循迹、光电开关等等。
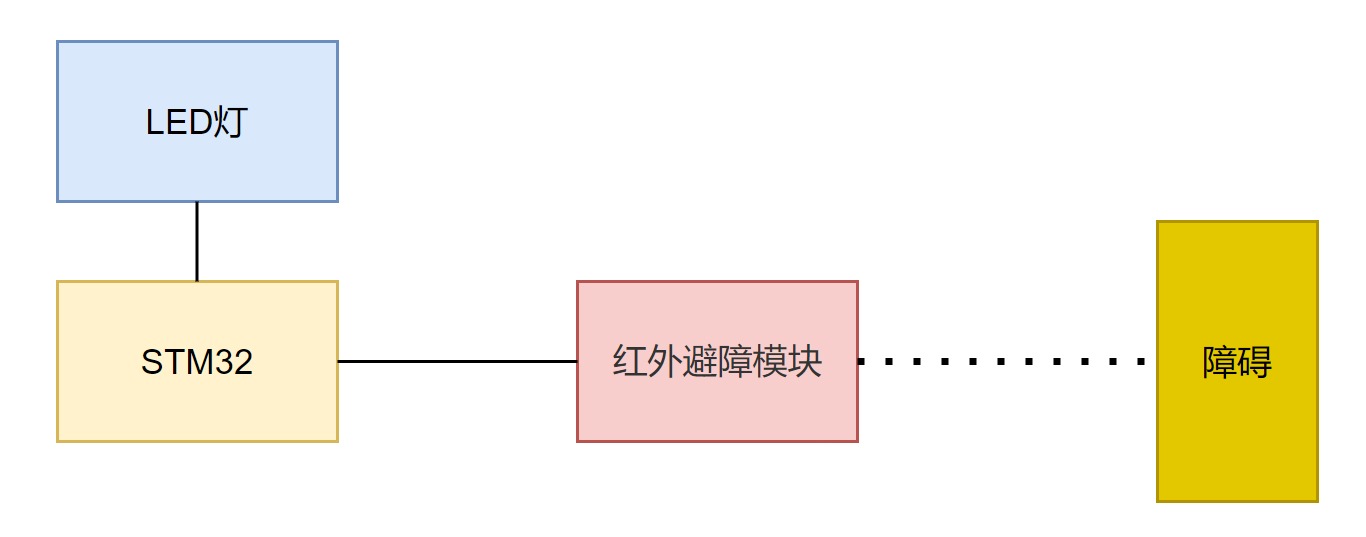
4. 通信示意图
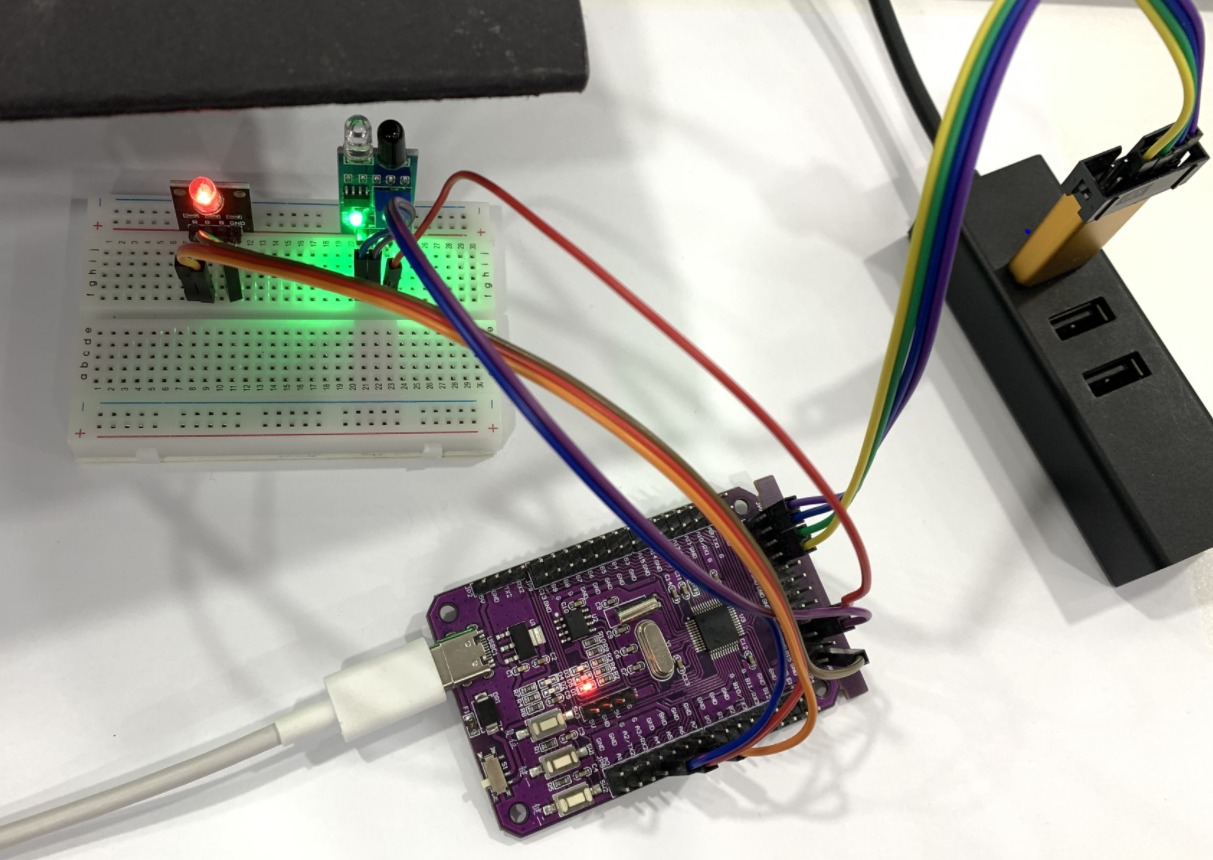
实现目标:我们有一个三色 LED 灯,当模块面前出现障碍物时,红灯亮,绿灯灭;没有障碍物时,红灯灭,绿灯亮。
这个小案例的应用场景可以应用在工业自动化,当物体或人在禁止区域或危险区域时,红灯亮起以提醒离开此区域。
5. 编程实战
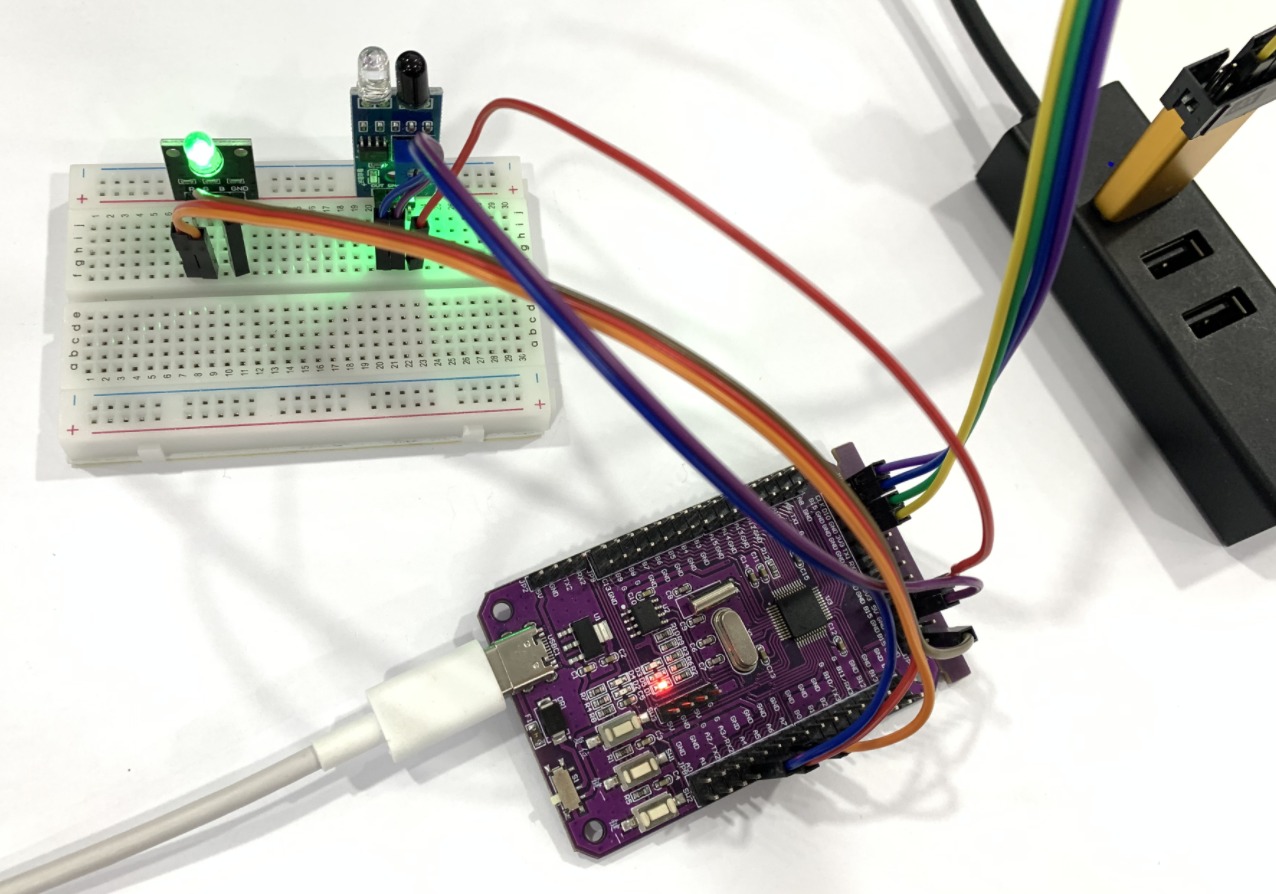
5.1 硬件接线
本教程使用的硬件如下:
- 单片机:STM32F103C8T6
- 红外避障模块
- 小灯:三色 LED 灯模块
- 烧录器:ST-LINK V2
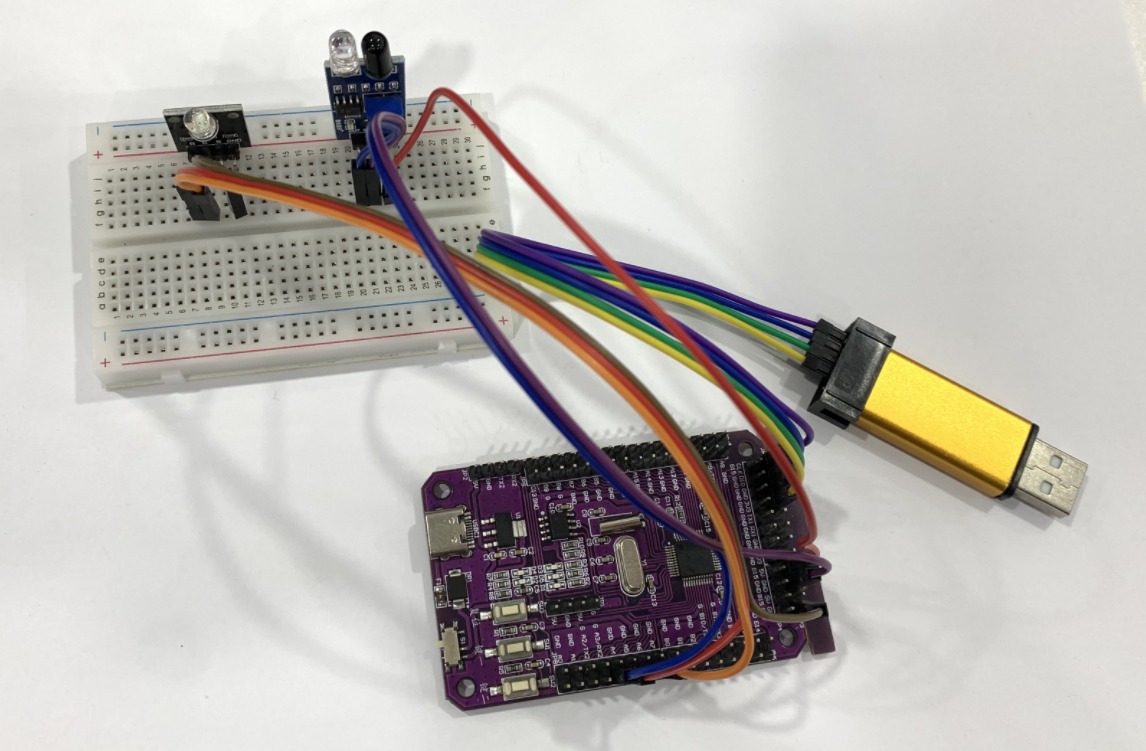
接线如下:
| 红外避障模块 | STM32 |
|---|---|
| VCC | 5V |
| GND | G |
| OUT | A4 |
烧录的时候接线如下表,如果不会烧录的话可以看我之前的文章【STM32下载程序的五种方法:https://www.lxlinux.net/e/stm32/five-ways-to-flash-program-to-stm32.html】。
| ST-Link V2 | STM32 |
|---|---|
| SWCLK | SWCLK |
| SWDIO | SWDIO |
| GND | GND |
| 3.3V | 3V3 |
接好如下图:
开发板使用的是我们自绘的板子。大家也可以用自己的板子,只要是 STM32F103C8T6 主控芯片就行。
5.2 LED初始化
LED 灯,我们的老朋友了,不多介绍了。
void led_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
LED1_GPIO_CLK_ENABLE(); /* LED1时钟使能 */
LED3_GPIO_CLK_ENABLE(); /* LED3时钟使能 */
gpio_init_struct.Pin = LED1_GPIO_PIN; /* LED1引脚 */
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(LED1_GPIO_PORT, &gpio_init_struct); /* 初始化LED1引脚 */
gpio_init_struct.Pin = LED3_GPIO_PIN; /* LED3引脚 */
HAL_GPIO_Init(LED3_GPIO_PORT, &gpio_init_struct); /* 初始化LED3引脚 */
LED1(0); /* 关闭 LED1 */
LED3(0); /* 关闭 LED3 */
}
LED 的 .h文件:
#ifndef _LED_H
#define _LED_H
#include "sys.h"
/******************************************************************************************/
/* 引脚 定义 */
#define LED1_GPIO_PORT GPIOA
#define LED1_GPIO_PIN GPIO_PIN_5
#define LED1_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */
#define LED3_GPIO_PORT GPIOA
#define LED3_GPIO_PIN GPIO_PIN_7
#define LED3_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */
/******************************************************************************************/
/* LED端口定义 */
#define LED1(x) do{ x ? \
HAL_GPIO_WritePin(LED1_GPIO_PORT, LED1_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(LED1_GPIO_PORT, LED1_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
#define LED3(x) do{ x ? \
HAL_GPIO_WritePin(LED3_GPIO_PORT, LED3_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(LED3_GPIO_PORT, LED3_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
/* LED取反定义 */
#define LED1_TOGGLE() do{ HAL_GPIO_TogglePin(LED1_GPIO_PORT, LED1_GPIO_PIN); }while(0) /* 翻转LED1 */
#define LED3_TOGGLE() do{ HAL_GPIO_TogglePin(LED3_GPIO_PORT, LED3_GPIO_PIN); }while(0) /* 翻转LED3 */
/******************************************************************************************/
/* 外部接口函数*/
void led_init(void); /* LED初始化 */
#endif
5.3 红外模块初始化
初始化一下循迹模块的 OUT 引脚。
我们采用中断的方式亮灯,需要初始化和使能一下 EXTI。
void ia_init(void)
{
GPIO_InitTypeDef gpio_initstruct;
IA_CLK(); /* IO口时钟使能 */
gpio_initstruct.Pin = IA_PIN; /* OUT引脚 */
gpio_initstruct.Mode = GPIO_MODE_IT_RISING_FALLING; /* 中断沿触发 */
gpio_initstruct.Pull = GPIO_NOPULL; /* 无电阻 */
HAL_GPIO_Init(IA_GPIO, &gpio_initstruct); /* 初始化OUT引脚 */
HAL_NVIC_SetPriority(EXTI4_IRQn,2,0); /* 抢占优先级2,响应优先级0 */
HAL_NVIC_EnableIRQ(EXTI4_IRQn); /* 使能EXTI4 */
}
5.4 红外模块控制灯
复写「HAL_GPIO_EXTI_Callback」函数,检测中断沿,下降沿表示循迹模块感受到有障碍,「iaflag」置1;上降沿表示循迹模块感受到无障碍,「iaflag」置0。
uint16_t iaflag;
uint16_t get_iaflag(void)
{
return iaflag;
}
void set_iaflag(uint16_t value)
{
iaflag = value;
}
void EXTI4_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_4); /* 调用中断处理公用函数 清除中断线 的中断标志位 */
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_4); /* HAL库默认先清中断再处理回调,退出时再清一次中断,避免按键抖动误触发 */
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == IA_PIN){
if(HAL_GPIO_ReadPin(IA_GPIO, IA_PIN) == GPIO_PIN_SET) //如果无障碍
{
set_iaflag(0);
}
if(HAL_GPIO_ReadPin(IA_GPIO, IA_PIN) == GPIO_PIN_RESET) //如果有障碍
{
set_iaflag(1);
}
}
}
5.5 主函数
主函数如下:
依据「iaflag」,为1时表示有障碍,红灯亮,绿灯灭;为0时表示无障碍,绿灯亮,红灯灭。
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
led_init(); /* LED初始化 */
ia_init(); /* 红外模块初始化 */
while(1)
{
if (get_iaflag()) //有障碍时,红灯亮,绿灯灭
{
HAL_GPIO_WritePin(LED1_GPIO_PORT, LED1_GPIO_PIN, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED3_GPIO_PORT, LED3_GPIO_PIN, GPIO_PIN_RESET);
}else{ //无障碍时,绿灯亮,红灯灭
HAL_GPIO_WritePin(LED3_GPIO_PORT, LED3_GPIO_PIN, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED1_GPIO_PORT, LED1_GPIO_PIN, GPIO_PIN_RESET);
}
}
}
5.6 运行效果
当模块面前没有障碍物时,红灯灭,绿灯亮。
出现障碍物时,红灯亮,绿灯灭。
6. 小结
随着科技的不断进步,红外避障模块将继续创新和发展,为自动化等领域带来更多可能性。未来,我们期待红外避障模块在智能交通、医疗机器人、智能家居等领域发挥更大的作用,提升生活的便捷性和安全性。希望本文能够帮助您对红外避障模块有更全面的了解,并激发您对该技术的兴趣。感谢各位看官,peace and love!
另外,想进大厂的同学,一定要好好学算法,这是面试必备的。这里准备了一份 BAT 大佬总结的 LeetCode 刷题宝典,很多人靠它们进了大厂。
刷题 | LeetCode算法刷题神器,看完 BAT 随你挑!
有收获?希望老铁们来个三连击,给更多的人看到这篇文章
推荐阅读:
- 程序员必备编程资料大全
- 程序员必备软件资源
欢迎关注我的博客:良许嵌入式教程网,满满都是干货!
这篇关于红外跟随避障模块详解的文章就介绍到这儿,希望我们推荐的文章对大家有所帮助,也希望大家多多支持为之网!
- 2024-12-23线下车企门店如何实现线上线下融合?
- 2024-12-23鸿蒙Next ArkTS编程规范总结
- 2024-12-23物流团队冬至高效运转,哪款办公软件可助力风险评估?
- 2024-12-23优化库存,提升效率:医药企业如何借助看板软件实现仓库智能化
- 2024-12-23项目管理零负担!轻量化看板工具如何助力团队协作
- 2024-12-23电商活动复盘,为何是团队成长的核心环节?
- 2024-12-23鸿蒙Next ArkTS高性能编程实战
- 2024-12-23数据驱动:电商复盘从基础到进阶!
- 2024-12-23从数据到客户:跨境电商如何通过销售跟踪工具提升营销精准度?
- 2024-12-23汽车4S店运营效率提升的核心工具



