【九月打卡】第18天 Python3入门机器学习
2022/9/24 4:17:00

本文主要是介绍【九月打卡】第18天 Python3入门机器学习,对大家解决编程问题具有一定的参考价值,需要的程序猿们随着小编来一起学习吧!
①课程介绍
课程名称:Python3入门机器学习 经典算法与应用 入行人工智能
课程章节:9-8;9-9
主讲老师:liuyubobobo
内容导读
- 第一部分 OVR实现原理
- 第二部分 OvO实现原理
- 第三部分
- 第四部分
②课程详细
OvR,OvO 逻辑回归只可以解决二分类问题,这里就如何将二分类变成多分类
OvR ONE VS REST一对剩余
OvO ONE VS ONE 一对一
第一部分 OVR实现原理
数据准备
训练数据
- 选取9个小球,X=9
- 共有三种颜色,红黄蓝,y = 3红 or 3黄 or 3蓝
训练过程
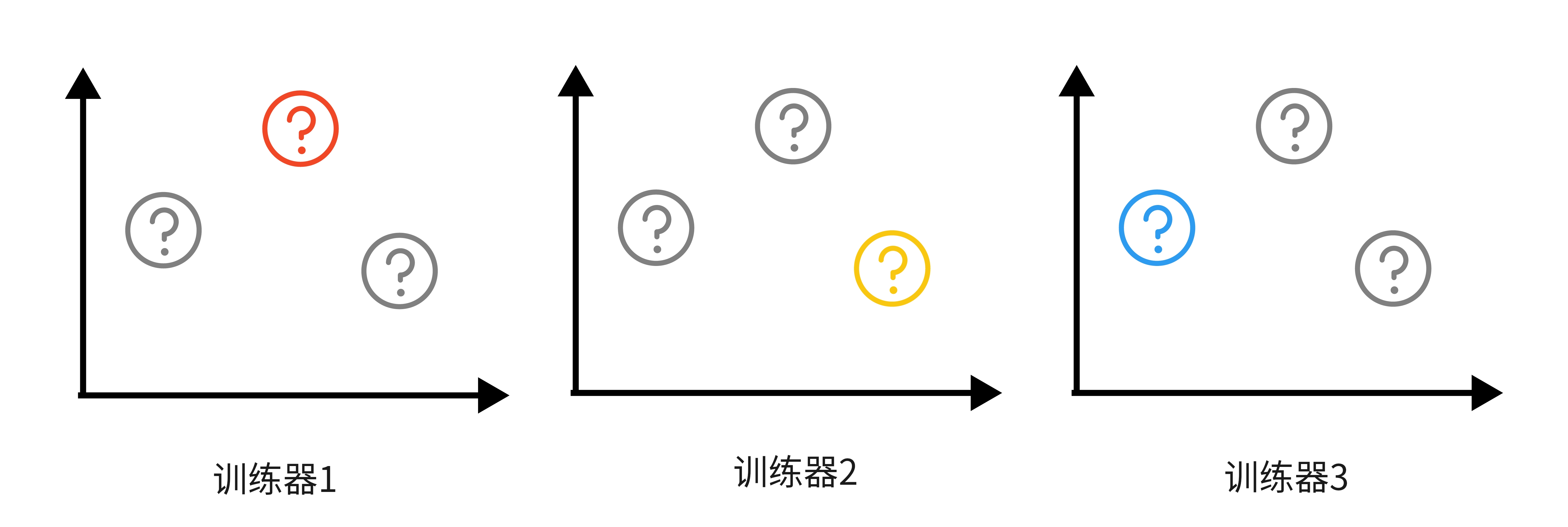
分为三个训练器
- 训练器1 ==红和其他类别
- 训练器2 ==黄和其他类别
- 训练器3 ==蓝和其他类别
整理数据
原始数据【红,红,红,黄,黄,黄,蓝,蓝,蓝】
- 在训练器1中将数据变成这样【红,红,红,灰,灰,灰,灰,灰,灰】
- 在训练器2中将数据变成这样【灰,灰,灰,黄,黄,黄,灰,灰,灰】
- 在训练器3中将数据变成这样【灰,灰,灰,灰,灰,灰,蓝,蓝,蓝】

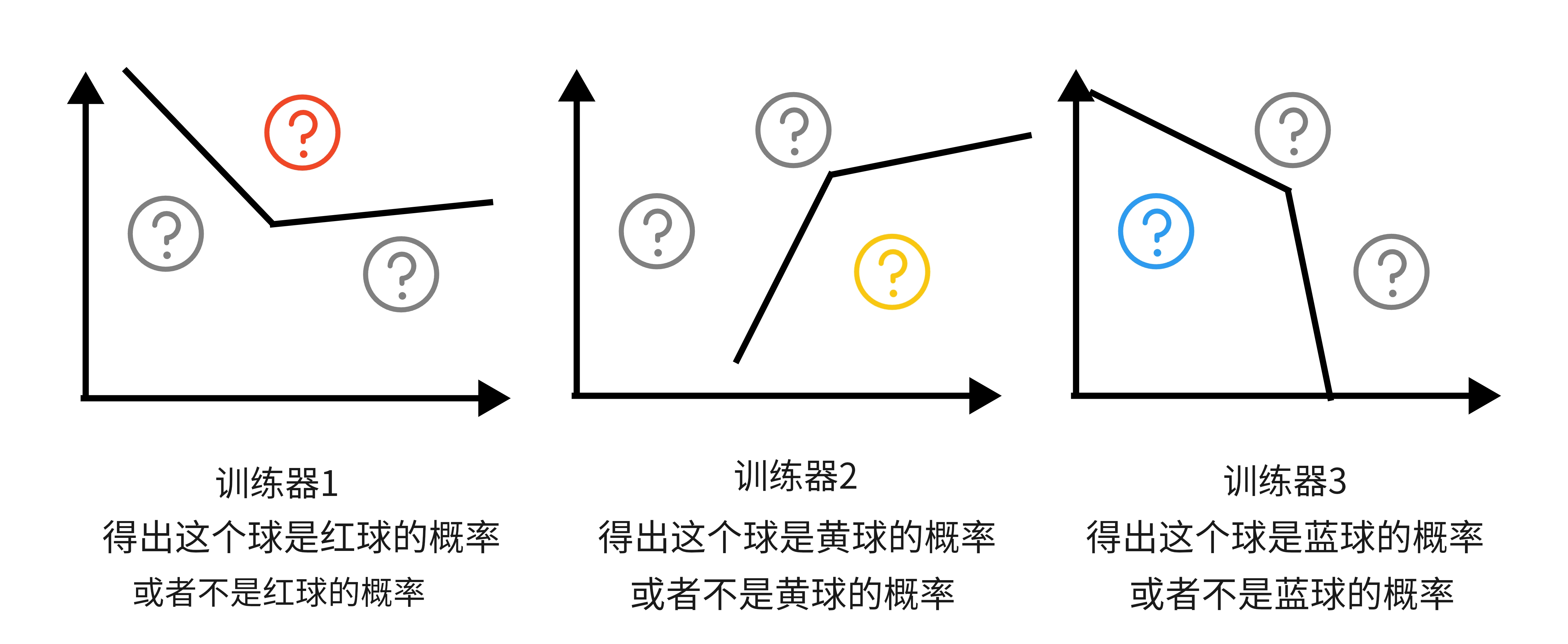
这样就把一个多分类问题变成了三个二分类问题。 - 通过逻辑回归计算出训练器1红色与灰色的决策边界
- 通过逻辑回归计算出训练器1黄色与灰色的决策边界
- 通过逻辑回归计算出训练器1蓝色与灰色的决策边界
测试过程
数据准备
一个红球
- 一个红球进入三个训练器,分别得到三种概率(0.9,0.1,0.01)
- 选取概率最高的训练器1,判断这个求是红球的概率为90%
- 判断概率>50%,输出y=红色
多个球的话依次类推
第二部分 OvO实现原理
数据准备
训练数据(老样子)
- 选取9个小球,X=9
- 共有三种颜色,红黄蓝,y = 3红 or 3黄 or 3蓝
训练过程
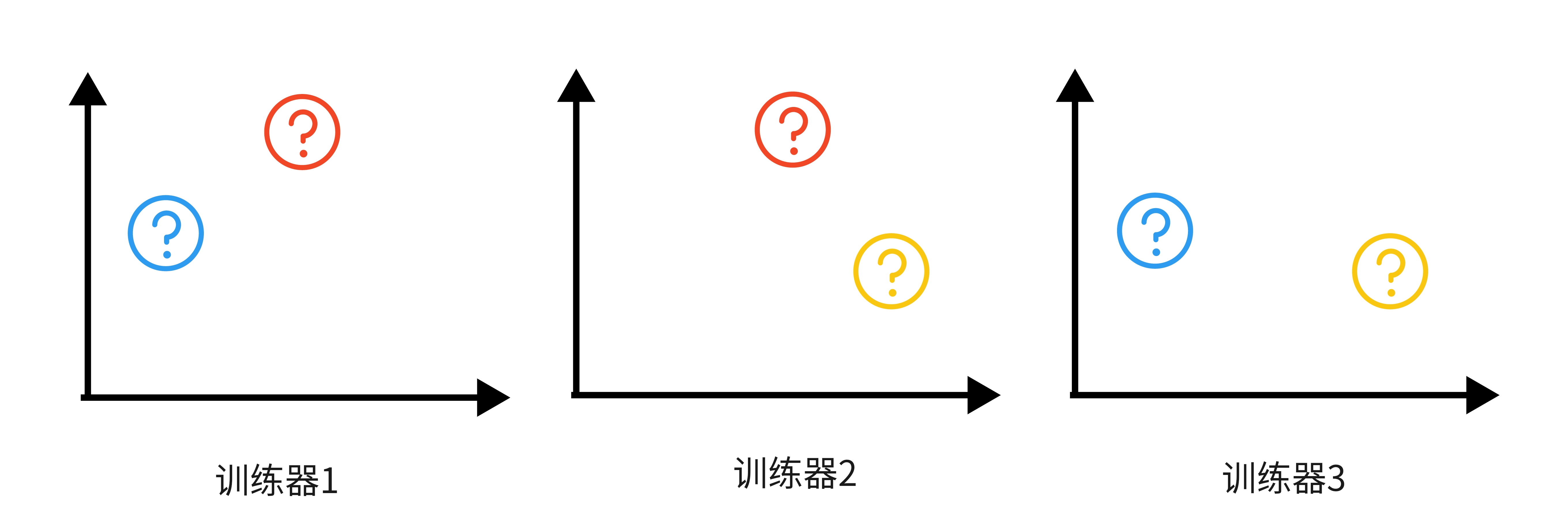
分为三个训练器
- 训练器1 ==红球和蓝球
- 训练器2 ==红球和黄球
- 训练器3 ==蓝球和黄球
整理数据
原始数据【红,红,红,黄,黄,黄,绿,绿,绿】
- 在训练器1中将数据变成这样【红,红,红,蓝,蓝,蓝】
- 在训练器2中将数据变成这样【红,红,红,黄,黄,黄】
- 在训练器3中将数据变成这样【黄,黄,黄,蓝,蓝,蓝】
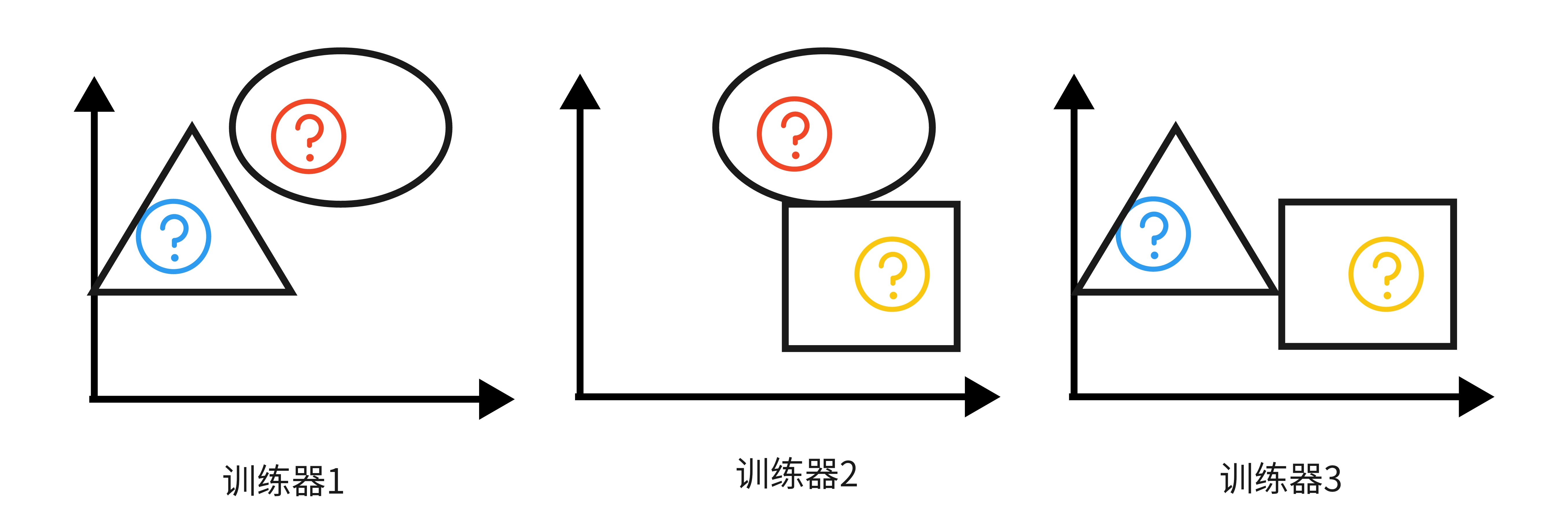
将三分数据分别输入三份训练器,从而得到三个决策边界
测试过程
《不确定3》
数据准备
一个红球
- 一个红球进入训练器1,训练器2和训练器3
- 分别得出三条概率(红:90%,蓝10%)(红:91%,黄:9%)(黄:11%,蓝:89%),
第一个分类器判断为 红
第二个分类器判断为 红
第三个分类器判断为 蓝
三个分类器,有两个分类器判断为 红;判断为红的分类器最多。所以最终,OvO 的判断是 红。
③课程思考
- 这种二分类转换为多分类的问题的方式很酷,就是耗能了一点,很不错的思路,继续加油!!!
④课程截图

这篇关于【九月打卡】第18天 Python3入门机器学习的文章就介绍到这儿,希望我们推荐的文章对大家有所帮助,也希望大家多多支持为之网!
- 2024-12-24Python编程入门指南
- 2024-12-24Python编程基础入门
- 2024-12-24Python编程基础:变量与数据类型
- 2024-12-23使用python部署一个usdt合约,部署自己的usdt稳定币
- 2024-12-20Python编程入门指南
- 2024-12-20Python编程基础与进阶
- 2024-12-19Python基础编程教程
- 2024-12-19python 文件的后缀名是什么 怎么运行一个python文件?-icode9专业技术文章分享
- 2024-12-19使用python 把docx转为pdf文件有哪些方法?-icode9专业技术文章分享
- 2024-12-19python怎么更换换pip的源镜像?-icode9专业技术文章分享



